首页
中心介绍
新闻中心
党建工作
成果介绍
创新基地
对外服务
专家在线
资源管理
赛事专区
工作简报
下载中心
中心概况
规章制度
中心结构图
中心快讯
社会效益
政策文件
基层党建
专题活动
党员发展
产学研成果
创新成果
创新立项
学科竞赛
培训招生
技术服务
实训室介绍
课表
当前位置:
首页
>>
创新基地
>>
创新立项
>>
正文
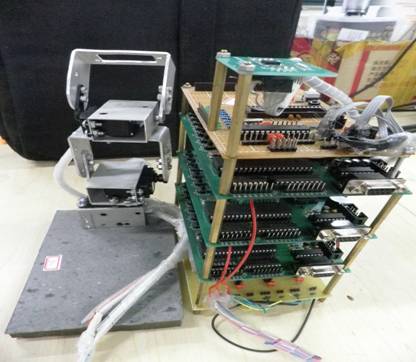
仿生机械手
2011年04月21日 21:05 点击:[ ]
作品名称:(仿生机械手)
赵鹏
,
指导教师:高凤有,
作品简介:本设计利用安装在人手臂部的传感器采集运动信号,单片机智能运算后发出控制指令,实现机械臂与人臂的同步运动。使机械臂实现三自由度并达到转移物体的目的。而且还可通过编程和仿生来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,体现了人的智能和适应性。
上一条:
关于申报2011年度大学生科研基金项目的通知
下一条:
光学视频台上的课堂演示实验组合
【
关闭
】
学校主页
|
设为首页
|
收藏本站
|
联系我们
|
友情链接
Copyright @ 2009-2010
www.25701720.com
地址:天津市大沽南路1310号 邮编:300222 电话(传真):(8622)28114421
etc#139.com